Research
Research at the MR&O Lab focuses on perception systems for mobile robots. Our goal is to advance the theoretical and practical foundations that allow mobile robots to operate in an unconstrained, dynamic environment. The approaches that we develop address real-world needs and are typically characterized by fusion of different sensor modalities. Where possible, the results of our research work are timely integrated in industrial demonstrators.
Our key areas of research comprise:
 Rich 3D Perception
Rich 3D Perception Long-term Autonomous Navigation
Long-term Autonomous Navigation Mobile Robot Olfaction
Mobile Robot Olfaction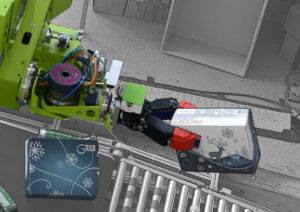 Autonomous Manipulation
Autonomous Manipulation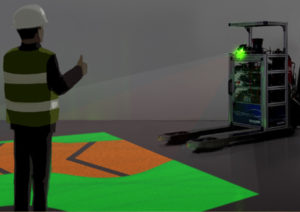 Human Robot Interaction
Human Robot Interaction Robot-assisted Environmental Monitoring
Robot-assisted Environmental Monitoring