Malcolm Mielle

About me
Hello, and welcome to my page,
I’m a PhD student in the Mobile Robotics and Olfaction Lab at the University of Örebro.
My research interest is mainly about “how to use prior information to help robots help us”. I work on using sketch maps, as in drawings of floor plans, and emergency maps, for robot navigation and mapping. I also have a personal blog where I talk about things, most of them related to what I do now.
That would be the kind of things I’m working on:
|
|
|
Softwares
I have some software available, some from my research and others not:
Research
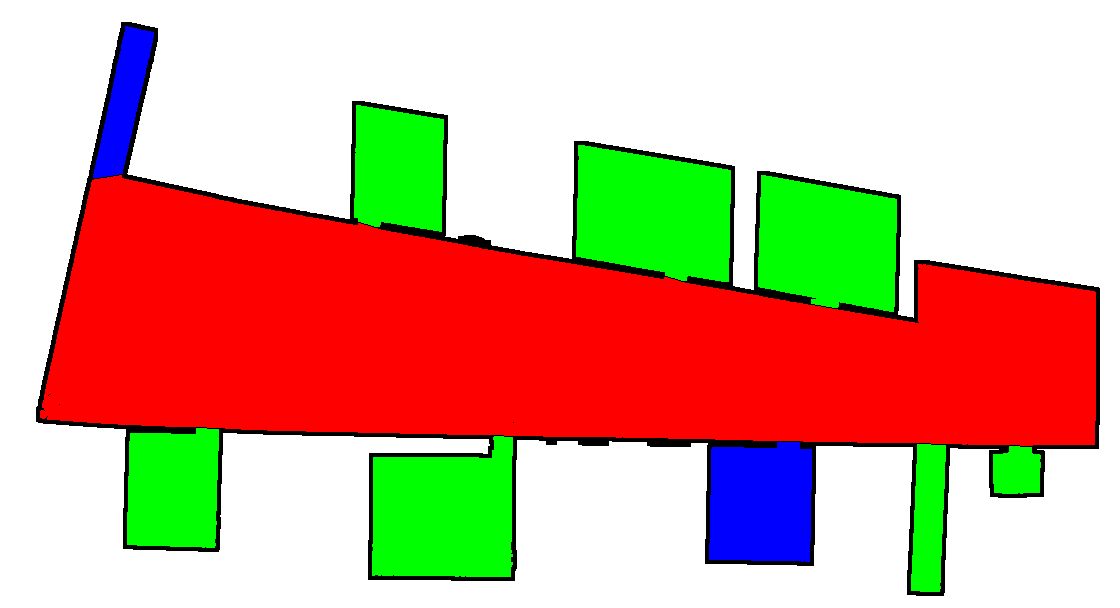
- maoris: a method to segment maps from different modalities. Tested on robot build maps and sketch maps. See the post here.
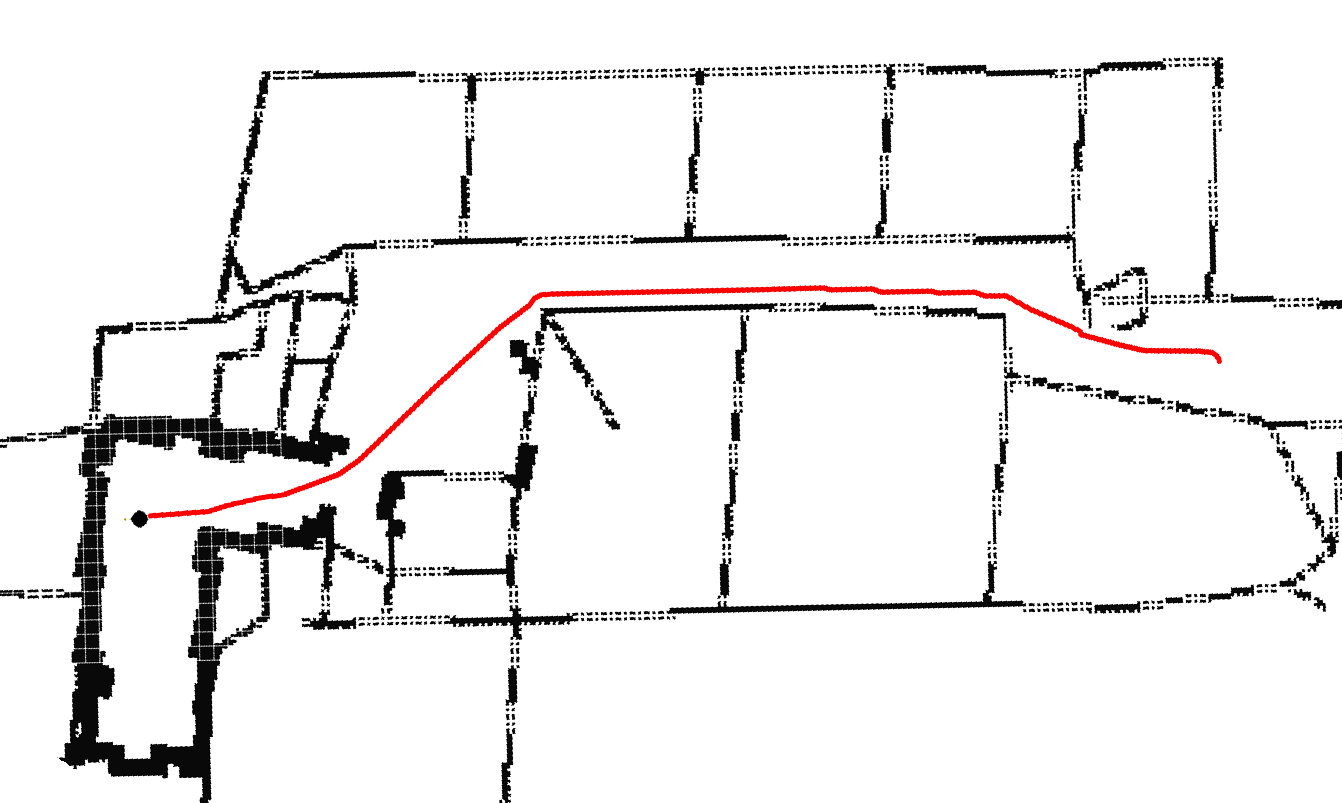
- Auto Complete Graphs: a method to integrate emergency maps into a map build by a robot. The goal of this program is summarised in this post.
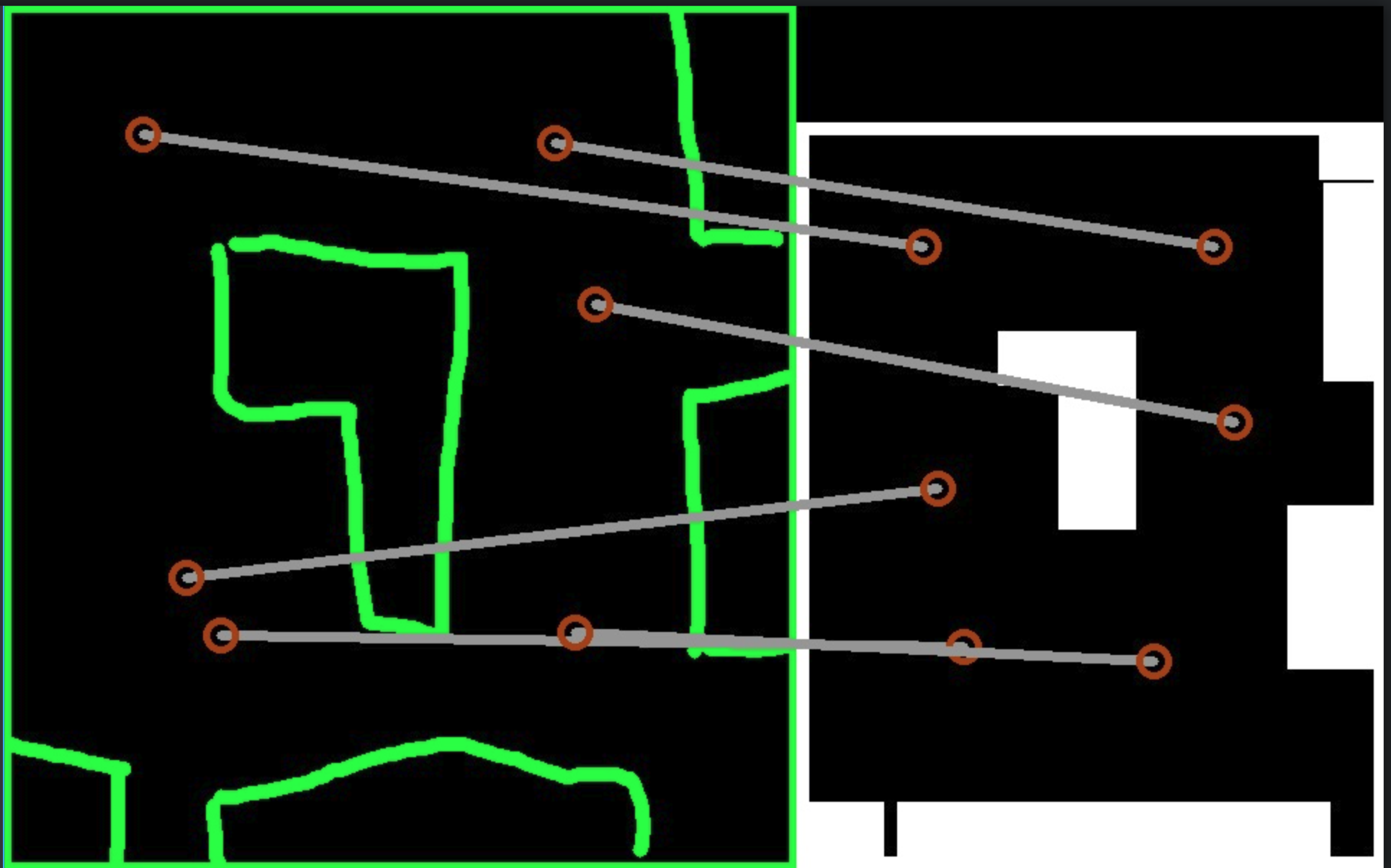
- Sketch Map Matching: a method to match a sketch map to a model map. There is also a ui to test it and post about it
Others
- OpenTLD 3d: the tracking algorithm TLD for ROS, with the depth.
- Gentoo overlaid: some ros stuff for Gentoo.
Datasets
- Sketch maps dataset: a dataset of 25 sketches and associated segmentation ground truth by two users.
Contact
Dr. Malcolm Mielle
AASS Research Centre
School of Science and Technology
Örebro University
70182 Örebro, Sweden
Room T1299
Phone +46 (0)19 30 13 55
malcolm.mielle@oru.se
Publications
Journal Articles
| [1] | The Auto-Complete Graph : Merging and Mutual Correction of Sensor and Prior Maps for SLAM. Robotics, 8(2), 2019 [ BibTeX | DiVA | PDF ] |
| [2] | URSIM : Unique Regions for Sketch Map Interpretation and Matching. Robotics, 8(2), 2019 [ BibTeX | DiVA | PDF ] |
Refereed Conference and Workshop Articles
| [1] | 3QFP : Efficient neural implicit surface reconstruction using Tri-Quadtrees and Fourier feature Positional encoding. 2024 [ BibTeX | DiVA | PDF ] |
| [2] | High-Fidelity SLAM Using Gaussian Splatting with Rendering-Guided Densification and Regularized Optimization. In 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2024 [ BibTeX | DiVA | PDF ] |
| [3] | A comparative analysis of radar and lidar sensing for localization and mapping. In 2019 European Conference on Mobile Robots (ECMR) 2019 [ BibTeX | DiVA | PDF ] |
| [4] | A method to segment maps from different modalities using free space layout MAORIS : map of ripples segmentation. , pages 4993-4999, 2018 [ BibTeX | DiVA | PDF ] |
| [5] | SLAM auto-complete : completing a robot map using an emergency map. In 2017 IEEE International Symposium on Safety, Security and Rescue Robotics (SSRR), pages 35-40, 2017 [ BibTeX | DiVA | PDF ] |
| [6] | Using emergency maps to add not yet explored places into SLAM. 2017 [ BibTeX | DiVA ] |
| [7] | Using sketch-maps for robot navigation : interpretation and matching. In 2016 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), pages 252-257, 2016 [ BibTeX | DiVA | PDF ] |
Theses
| [1] | Helping robots help us : Using prior information for localization, navigation, and human-robot interaction. Örebro University, School of Science and Technology, Ph.D. Thesis, 2019 [ BibTeX | DiVA | PDF ] |
Find the complete BibTeX record here.