Autonomous Agro-food Systems
Research Vision
Growing world population, climate changes and rising demand for food and crops has been the driving force of global efforts to increase crop production yields in the last few decades. These increasing demands coupled with the declining number of skilled workforce and rising labor costs are the main market forces behind the introduction of automation into crop production. Digital technologies (e.g. remote and local sensing, data analytics, AI, IoT, automation and robotics) offer much potential to address these challenges. Automation efforts are introduced into both labor intensive aspects of agricultural work (such as transplanting and seeding, harvesting, spraying, and pruning), as well as for the development of data collection and analysis infrastructures in the aim to optimize crop yield and plant health. In the autonomous agro-food research direction we aim to develop robotic systems to lead the mentioned above efforts through tight collaboration with key industrial and scientific partners.
Lomas++ – Machine-Learning & Optimization driven AGRO SENSORY AI prototype (Precision Cultivation, Flavor-Health-Cyber Cultivation, Explainable AI models, AI-based multi-objective optimization)
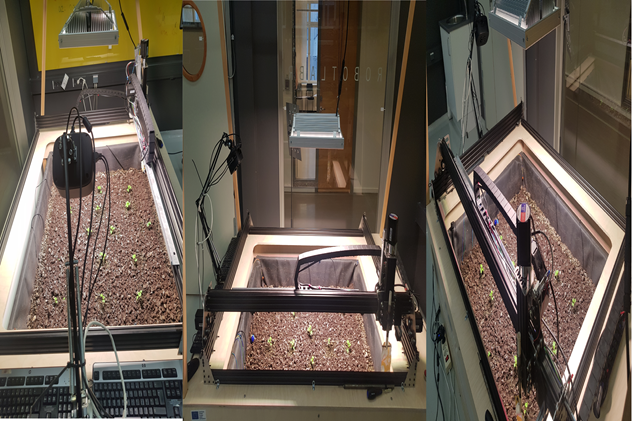 Researchers in Orebro university grow pak choi & basil under controlled environmental conditions to study how taste & nutritional compositions are affected, that are autonomously operated by the robotic platforms. One such robotic setup is “LOMAS++” an autonomous smart cultivation test bed stationed at the AASS Robot Lab. Soil loosening, digging and seed plotting can be done using the automated robotic arm maneuvering operation, and further weeds are cleared. With our designed open-source automated Internet of Things (IoT) facility monitoring the environment continuously, and the automated multi-spectral imaging setup, we can collect data round-the-clock for the entire growth period. The project’s goal is to design an end-to-end real-time AI system at the intersection of data acquisition, sensing, and machine learning, while applying it to plant science research. “We are focused on building networked tools that can take a plant’s experience, it’s phenotype, the set of stresses it encounters, it’s ground measured traits, and digitize that to allow us to understand the plant-environment interaction better”. We aim on building a Democratized & Explainable AI (XAI) System, taking wisdom from plant sciences, life sciences, nutritional sciences, and combining it with modern forms of technological intelligence while applying it to agricultural research in a fashion, that hasn’t been done before in context to providing flavor insights, sensory perception, nutrient insights, precision growth traits, and revealing the optimized environmental settings to get those. With an autonomous controlled robotic setup like ours, and in-line with multi-disciplinary collaborations, one can focus on several trending & high impact real-world challenging problems like working on enhancing the human disease-fighting properties of herbs, novel drug discovery in medicinal plants, tilting the odds in plant breeding to discovery effective recipes, Accurate 3D reconstruction for virtual phenotype farming – aimed for cropping mapping, yield estimation, etc. to name a few.
Researchers in Orebro university grow pak choi & basil under controlled environmental conditions to study how taste & nutritional compositions are affected, that are autonomously operated by the robotic platforms. One such robotic setup is “LOMAS++” an autonomous smart cultivation test bed stationed at the AASS Robot Lab. Soil loosening, digging and seed plotting can be done using the automated robotic arm maneuvering operation, and further weeds are cleared. With our designed open-source automated Internet of Things (IoT) facility monitoring the environment continuously, and the automated multi-spectral imaging setup, we can collect data round-the-clock for the entire growth period. The project’s goal is to design an end-to-end real-time AI system at the intersection of data acquisition, sensing, and machine learning, while applying it to plant science research. “We are focused on building networked tools that can take a plant’s experience, it’s phenotype, the set of stresses it encounters, it’s ground measured traits, and digitize that to allow us to understand the plant-environment interaction better”. We aim on building a Democratized & Explainable AI (XAI) System, taking wisdom from plant sciences, life sciences, nutritional sciences, and combining it with modern forms of technological intelligence while applying it to agricultural research in a fashion, that hasn’t been done before in context to providing flavor insights, sensory perception, nutrient insights, precision growth traits, and revealing the optimized environmental settings to get those. With an autonomous controlled robotic setup like ours, and in-line with multi-disciplinary collaborations, one can focus on several trending & high impact real-world challenging problems like working on enhancing the human disease-fighting properties of herbs, novel drug discovery in medicinal plants, tilting the odds in plant breeding to discovery effective recipes, Accurate 3D reconstruction for virtual phenotype farming – aimed for cropping mapping, yield estimation, etc. to name a few.
Patty
 In this research project, a collaboration between MRO and Man-Technology-Environment research centre (MTM) we investigate the affects of mechanical stress induction phenomena in plants. In the academic literature, there are several studies looking into the effect of mechanical contact with plants (such as animals passing by and moving the leaves, or wind). In these studies, significant changes in plant morphology are reported. In our research, we analyzed plants that were repeatedly stroked in the search for not only morphological changes but significant alterations in metabolites (substances that occur in the plant’s cells) and nutrients as a result of simple movements. Our current ongoing analysis suggests already now that healthier, tastier and more visually appealing crops can be grown using repetitive stroking movements. To further explore this phenomenon, we developed an autonomous robotic platform able to precisely induce mechanical stress in plants to ensure precision and repeatability of the operations to further study the phenomenon.
In this research project, a collaboration between MRO and Man-Technology-Environment research centre (MTM) we investigate the affects of mechanical stress induction phenomena in plants. In the academic literature, there are several studies looking into the effect of mechanical contact with plants (such as animals passing by and moving the leaves, or wind). In these studies, significant changes in plant morphology are reported. In our research, we analyzed plants that were repeatedly stroked in the search for not only morphological changes but significant alterations in metabolites (substances that occur in the plant’s cells) and nutrients as a result of simple movements. Our current ongoing analysis suggests already now that healthier, tastier and more visually appealing crops can be grown using repetitive stroking movements. To further explore this phenomenon, we developed an autonomous robotic platform able to precisely induce mechanical stress in plants to ensure precision and repeatability of the operations to further study the phenomenon.
Autonomous yield estimation in vineyards
 Yield estimation is of critical importance to vineyard growers for optimizing growth, harvesting preparations, crop shipment, storage scheduling, and marketing purposes.
Yield estimation is of critical importance to vineyard growers for optimizing growth, harvesting preparations, crop shipment, storage scheduling, and marketing purposes.
Vineyard yield can be estimated from the average number of clusters per vine and the average cluster weight. Typically yield estimation is performed manually by sampling part of the vineyard and extrapolating to the rest of the vineyard. Since manual practice is labor intensive and expensive, the sampled portion of the vineyard is very limited, yielding inaccurate and biased yield estimation. Automation of the procedure, using remote sensing and mobile robots, introduces non invasive methods that can cover larger portions of the vineyard in timely manner leading to improved yield estimation. To achieve this task, appropriate sensor selection and data driven algorithm development are necessary. In this ongoing collaboration with researchers from the intelligent robotics lab at Ben-Gurion University, Israel, the Agricultural engineering lab, Vollcani research center, Israel and the intelligent robotics lab, Umeå university, Sweden, we are building an autonomous yield estimation robot