Daniel Canelhas

I am a PhD student in robot vision, interested in 3D mapping, camera tracking, optimization and machine learning. I like to make art, write code, play music, do sports, read science-fiction, science-fact, play video-games, and tell bad jokes.
Academic
- 2012–present
Ph.D. in Computer Science at Örebro Universitet
Truncated Signed Distance Fields and Their Application to Robotics - 2010–2012
M.Sc. Robotics and Intelligent Systems at Örebro Universitet
Scene Representation, Registration and Object Detection in a Truncated Signed Distance Function Representation of 3D Space - 2002–2006
B.Sc. Mechanical Engineering with emphasis in Mechatronics at Pontíficia Universidade Católica – Minas Gerais – Brazil
Undergraduate research with Prof. Marcelo Becker on auto-localization of indoor mobile robots under a scientific initiation scholarship
Professional
- 2016 – Örebro Universitet, Teaching Assistant in Computer Graphics
- 2016 – Örebro Universitet, Teaching Assistant in Multi-Agent Systems
- 2015 – Örebro Universitet, Undergraduate Thesis supervisor
“Baking And Compression For Dynamic Lighting Data” by Tom Olsson – DIVA - 2015 – Örebro Universitet, Teaching Assistant in Computer Animation
- 2014 – Örebro Universitet, Teaching Assistant in Computer Graphics
- 2013 – Örebro Universitet, Teaching Assistant in C-programming
- 2007–2012 – Areva T&D / Alstom Grid (Västerås), Mechanical Design Engineer in High-voltage AC substation (15 to 400kV)
- 2006 – CEMIG (Belo Horizonte, Brazil), Internship in High-voltage AC substation automation and electrical engineering
- 2001–2002 – Intervalo (Belo Horizonte, Brazil), Internship in classical 2D animation and illustration
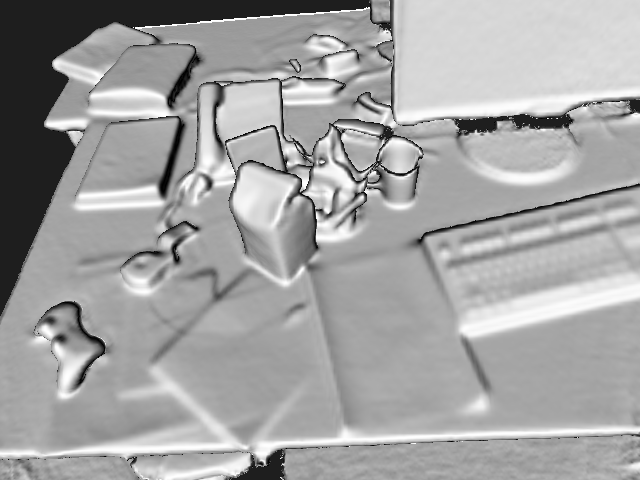
3D reconstruction using the SDF-Tracker algorithm, estimating camera pose and fusing depth images into a dense 3D model on the CPU (code)
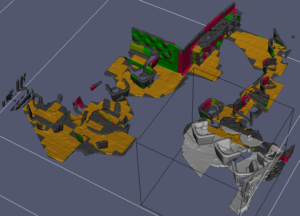
Mapping a large environment by shifting the reconstruction volume and encoding exiting voxels as their eigen-shapes descriptors.
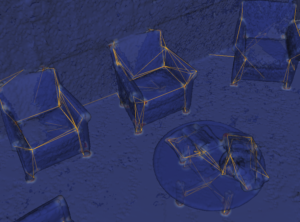
For really large scenes you might want an (even) sparser representation. Sparse Stable Scene Graphs (SSSG) represents the dense 3d model as a graph of spatially interconnected feature
Contact
Dr. Daniel Canelhas
AASS Research Centre
School of Science and Technology
Örebro University
70182 Örebro, Sweden
Room T1102
Phone +46 (0)19 30 35 36
daniel.canelhas@oru.se
Publications
Journal Articles
| [1] | Compressed Voxel-Based Mapping Using Unsupervised Learning. Robotics, 6(3), 2017 [ BibTeX | DiVA ] |
| [2] | From Feature Detection in Truncated Signed Distance Fields to Sparse Stable Scene Graphs. IEEE Robotics and Automation Letters, 1(2):1148-1155, 2016 [ BibTeX | DiVA | PDF ] |
| [3] | No More Heavy Lifting : Robotic Solutions to the Container-Unloading Problem. IEEE robotics & automation magazine, 23(4):94-106, 2016 [ BibTeX | DiVA | PDF ] |
| [4] | An Eigenshapes Approach to Compressed Signed Distance Fields and Their Utility in Robot Mapping. CoRR, abs/1609.02462, 2016 [ BibTeX | PDF ] |
Refereed Conference and Workshop Articles
| [1] | A Survey of Voxel Interpolation Methods and an Evaluation of Their Impact on Volumetric Map-Based Visual Odometry. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA),, pages 6337-6343, 2018 [ BibTeX | DiVA | PDF ] |
| [2] | Improved local shape feature stability through dense model tracking. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 3203-3209, 2013 [ BibTeX | DiVA | PDF ] |
| [3] | SDF tracker : a parallel algorithm for on-line pose estimation and scene reconstruction from depth images. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 3671-3676, 2013 [ BibTeX | DiVA | PDF ] |
Theses
| [1] | Truncated Signed Distance Fields Applied To Robotics. Örebro University, School of Science and Technology, Ph.D. Thesis, 2017 [ BibTeX | DiVA | PDF ] |
| [2] | Scene Representation, Registration and ObjectDetection in a Truncated Signed Distance FunctionRepresentation of 3D Space. Örebro University, School of Science and Technology, M.Sc. Thesis, 2012 [ BibTeX | DiVA | PDF ] |
Find the complete BibTeX record here.