Software
ROS Packages
perception_oru
This stack contains packages developed at the Mobile Robotics and Olfaction Lab at Orebro University. The stack provides perception packages for processing range sensor data. The main scope of this stack covers packages related to the Normal Distribution Transform (NDT) and related mapping and registration methods. In addition, this stack provides an efficient CPU implementation of truncated SDF tracking for Kinect-like devices.
Contact: Todor Stoyanov, todor.stoyanov@oru.se
navigation_oru
Contains a set of navigation tools for non-holonomic vehicles (e.g. fork-lifts). It includes a simulation setup of two retrofitted ‘cititruck’ forklifts.
Contact: Henrik Andreasson henrik.andreasson@oru.se
coordination_oru_ros
This package provides an online coordination method for multiple robots for use with the navigation_oru package. It is based on the coordination_oru implementation of a trajectory-envelope based coordination algorithm.
Contact: Federico Pecora federico.pecora@oru.se
epos_driver
A ROS package providing an interface to control Maxon motors via a EPOS controler
Contact: Tomasz Kucner, tomasz.kucner@oru.se
promts
A ROS stack that implements the proposed object pose refinement in the article A Principle of Minimum Translation Search Approach for Object Pose Refinement presented in IROS 2015 conference.
Contact: Rasoul Mojtahedzadeh, rasoul.mojtahedzadeh@oru.se
Data Sets
RefleX Human Detection Dataset
This dataset has been used in connection with the PhD thesis Vision-based Human Detection from Mobile Machinery in Industrial Environments. It contains a collection of images acquired with an RGB/NIR multi-camera setup depicting people equipped with retro-reflective work clothing in different body positions. All human occurrences in the images are annotated with a ground-truth bounding box as well as the metric distance from the camera.
Contact: Rafael Mosberger, rafael.mosberger@oru.se
Download: reflex-human-detection.zip [70MB]
Field data for 3D place categorisation
This data set consists of 3D point clouds collected with a Velodyne HDL-64E mounted on a wheel loader. The environment is a test site for Volvo Construction Equipment in Eskilstuna, Sweden, and contains both open areas and forest. In particular, there are three main regions: an open gravel plain, a gravel road going through the forest, and a narrow (bumpy) smaller forest path. Format: PCD.
Contact: Martin Magnusson, martin.magnusson@oru.se
Download: EskilstunaField-placecat.zip [1.9 GB]
http://aass.oru.se/Research/mro/data/
Mapping datasets
The following dataset were released together with the tutorial of graph_map and ndt_core from the preception_oru group.
Contact: Daniel Adolfsson, Daniel.Adolfsson@oru.se
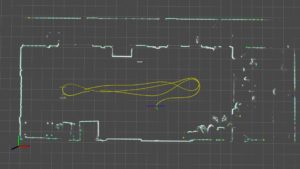
ORU robotics lab 2018 (2d)
Mapping of the robotics lab using a SICK LS2000 mounted on a cititruck from Linde. Ground truth positioning data is provided.
Download: 2018-05-18-09-55-16.bag [19.9Mb]
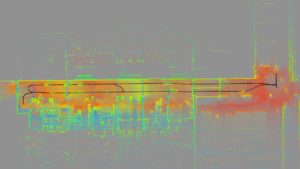
Intra-logistic navigation 2012 (3d)
Mapping of human-robot shared intra-logistic environments using a Velodyne HDL-32E laser. The laser was mounted on Toyota truck running completely autonomously. Ground truth positioning data is provided.
Download: 2012-09-05-09-44-50_0.bagfix.bag [1.4Gb]
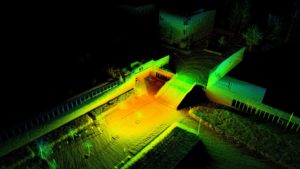
ORU campus 2018 (3d)
Mapping at Örebro campus using a Velodyne HDL-32E and an IMU for odometry estimation.
Download: april19_scan3.bag [188.1Mb]