Home
The Mobile Robotics & Olfaction Lab
We have changed our name to the Robot Navigation and Perception Lab and moved our web presence to rnp.aass.oru.se. Please find us there instead.
Our research focuses on perception for intelligent systems, in particular for mobile robots. Our goal is to advance the theoretical and practical foundations that allow mobile robots to operate in an unconstrained, dynamic environment. The approaches that we develop address real-world needs and are typically characterized by fusion of different sensor modalities. Where possible, the results of our research work are timely integrated in industrial demonstrators.
Featured Publications (old, pre-2022)
 P. Kurtser, V. Castro Alves, A. Arunachalam, V. Sjöberg, U. Hanell, T. Hyötyläinen and H. Andreasson.
P. Kurtser, V. Castro Alves, A. Arunachalam, V. Sjöberg, U. Hanell, T. Hyötyläinen and H. Andreasson.
Development of Novel Robotic Platforms for Mechanical Stress Induction, and their Effects on Plant Morphology, Elements, and Metabolism.
Scientific Reports, 11(1), 23876, 2021.
[ BibTeX | DiVA | URL ] D. Adolfsson, M. Magnusson, A. Alhashimi, A. J. Lilienthal and H. Andreasson.
D. Adolfsson, M. Magnusson, A. Alhashimi, A. J. Lilienthal and H. Andreasson.
CFEAR Radarodometry – Conservative Filtering for Efficient and Accurate Radar Odometry.
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021.
[ BibTeX | DiVA | URL ] Q. Liao, D. Sun, H. Andreasson.
Q. Liao, D. Sun, H. Andreasson.
Point Set Registration for 3D Range Scans Using Fuzzy Cluster-based Metric and Efficient Global Optimization.
IEEE Transactions on Pattern Analysis and Machine Intelligence (PAMI), 43(9):3229-3246, 2021.
[ BibTeX | DiVA | URL | PDF ] M. A. Arain, V. Hernandez Bennetts, E. Schaffernicht, and A. J. Lilienthal.
M. A. Arain, V. Hernandez Bennetts, E. Schaffernicht, and A. J. Lilienthal.
Sniffing Out Fugitive Methane Emissions: Autonomous Remote Gas Inspection with a Mobile Robot.
International Journal of Robotics Research (IJRR), 40(4-5):782-814, 2021.
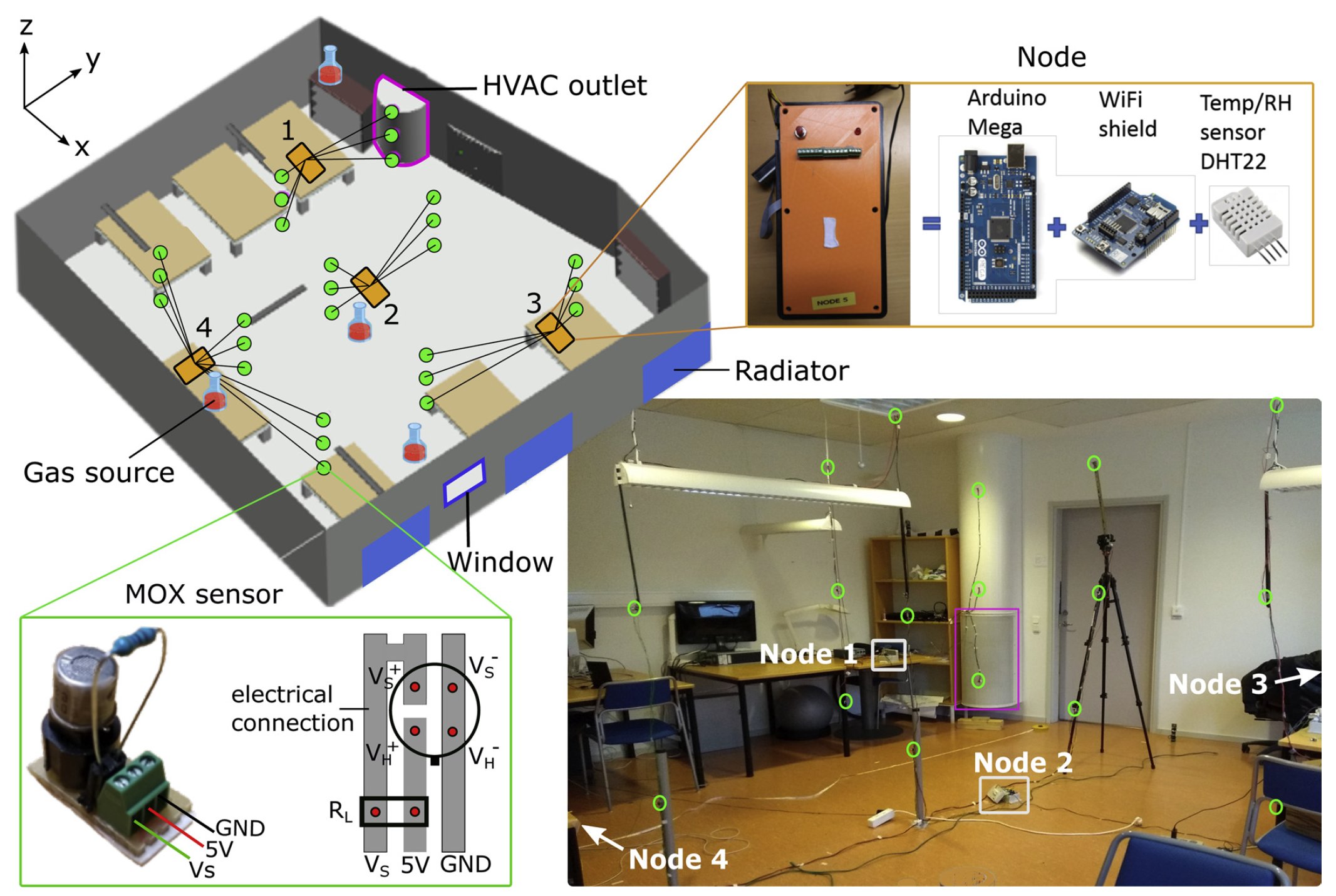
[ BibTeX | DiVA | URL ] J. Burgues, V. Hernandez Bennetts, A. J. Lilienthal and S. Marco.
J. Burgues, V. Hernandez Bennetts, A. J. Lilienthal and S. Marco.
Gas Distribution Mapping and Source Localization Using a 3D Grid of Metal Oxide Semiconductor Sensors.
Sensors and Actuators. B, Chemical (SAB), 304, 127309, 2020.
[ BibTeX | DiVA | URL ]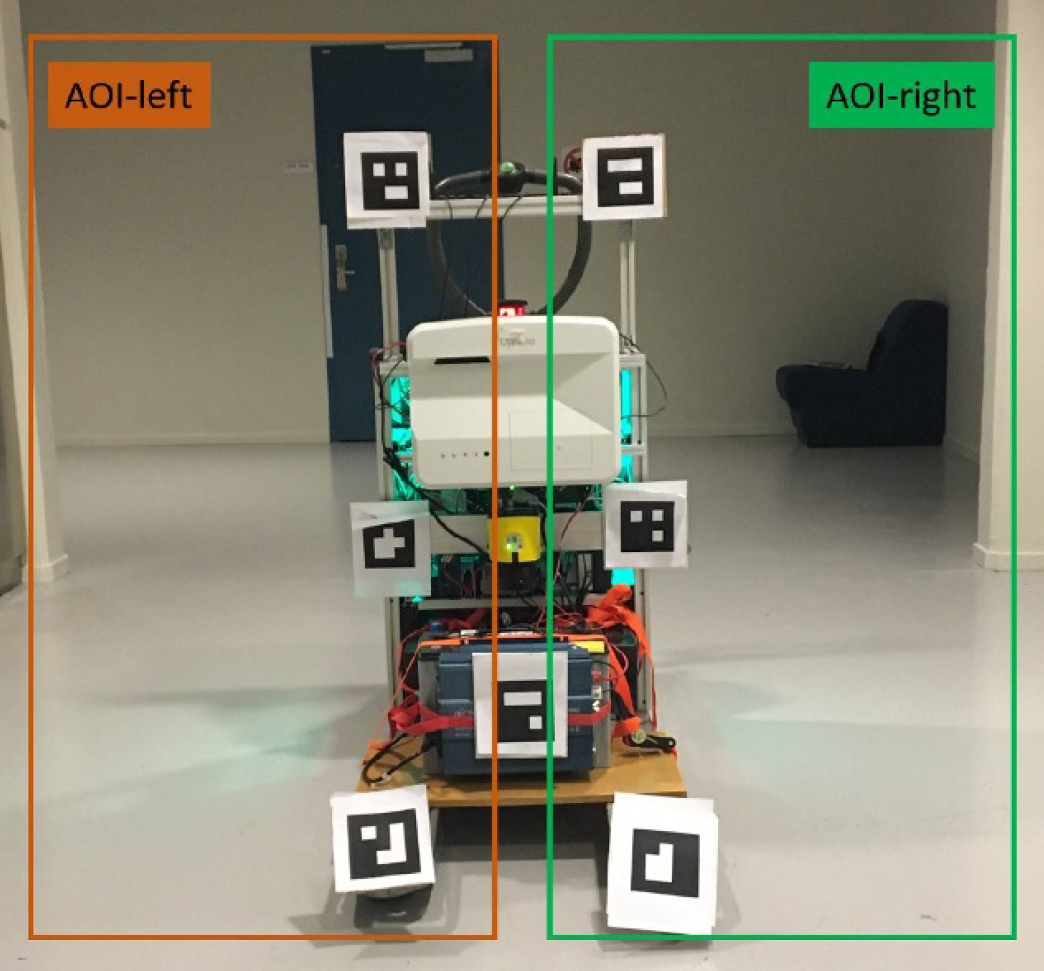 R. T. Chadalavada, H. Andreasson, M. Schindler, R. Palm, and A. J. Lilienthal.
R. T. Chadalavada, H. Andreasson, M. Schindler, R. Palm, and A. J. Lilienthal.
Bi-directional navigation intent communication using spatial augmented reality and eye-tracking glasses for improved safety in human–robot interaction.
Robotics and Computer-Integrated Manufacturing (RCIM), 2020.
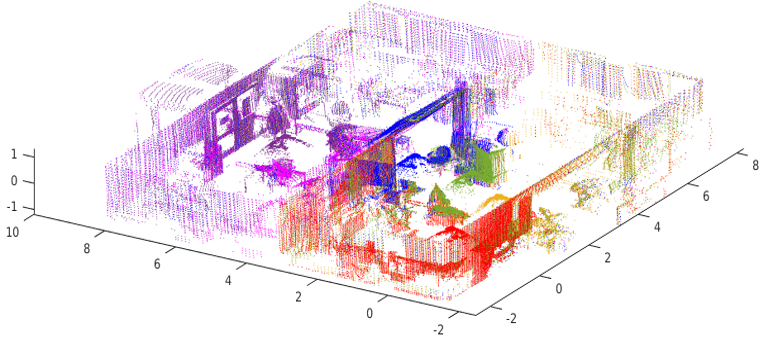
[ BibTeX | DiVA | URL ] T. P. Kucner, M. Magnusson, L. Palmieri, C. S. Swaminathan, and A. J. Lilienthal.
T. P. Kucner, M. Magnusson, L. Palmieri, C. S. Swaminathan, and A. J. Lilienthal.
Probabilistic Mapping of Spatial Motion Patterns for Mobile Robots.
Springer Cognitive Systems Monographs (COSMOS), Volume 42, 2020.
[ BibTeX | DiVA | URL ]



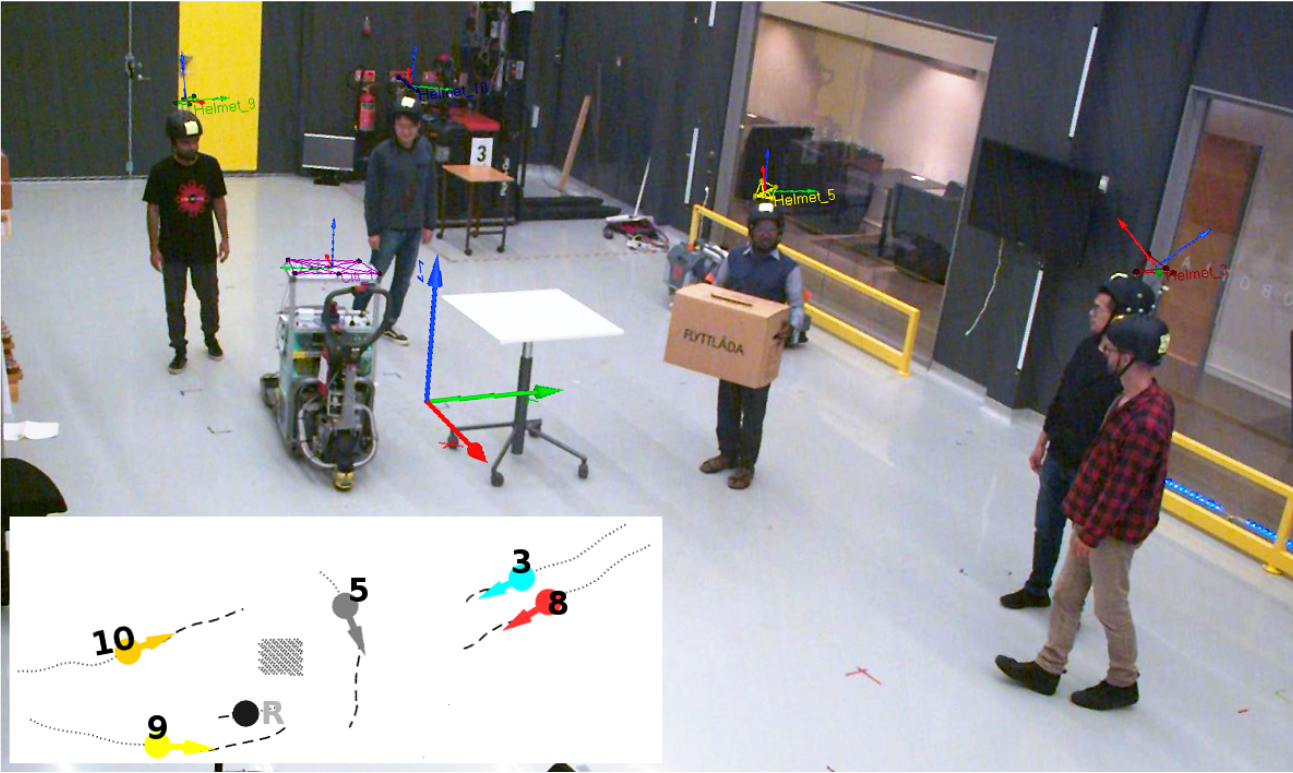
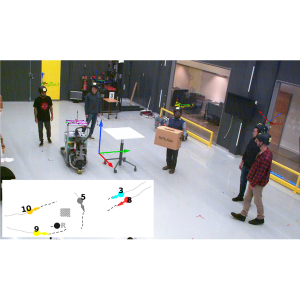 A. Rudenko, T. P. Kucner, C. S. Swaminathan, R. T. Chadalavada, K. O. Arras and A. J. Lilienthal.
A. Rudenko, T. P. Kucner, C. S. Swaminathan, R. T. Chadalavada, K. O. Arras and A. J. Lilienthal.
THÖR: Human-Robot Navigation Data Collection and Accurate Motion Trajectories Dataset.
IEEE Robotics and Automation Letters (RA-L), 5(2):676-682, 2020.
[ BibTeX | DiVA | URL ]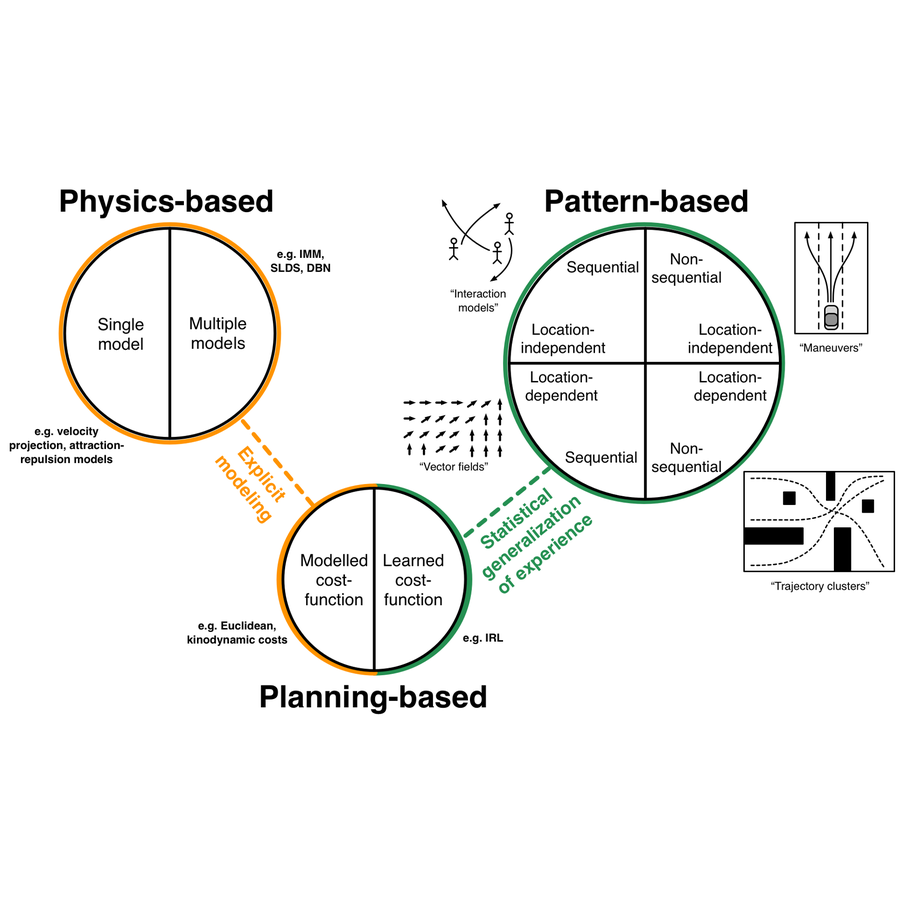 A. Rudenko, L. Palmieri, M. Herman, K. M. Kitani, D. M. Gavrila and K. O. Arras.
A. Rudenko, L. Palmieri, M. Herman, K. M. Kitani, D. M. Gavrila and K. O. Arras.
Human Motion Trajectory Prediction: A Survey.
International Journal of Robotics Research (IJRR), 39(8):895-935, 2020.
[ BibTeX | DiVA | URL ]
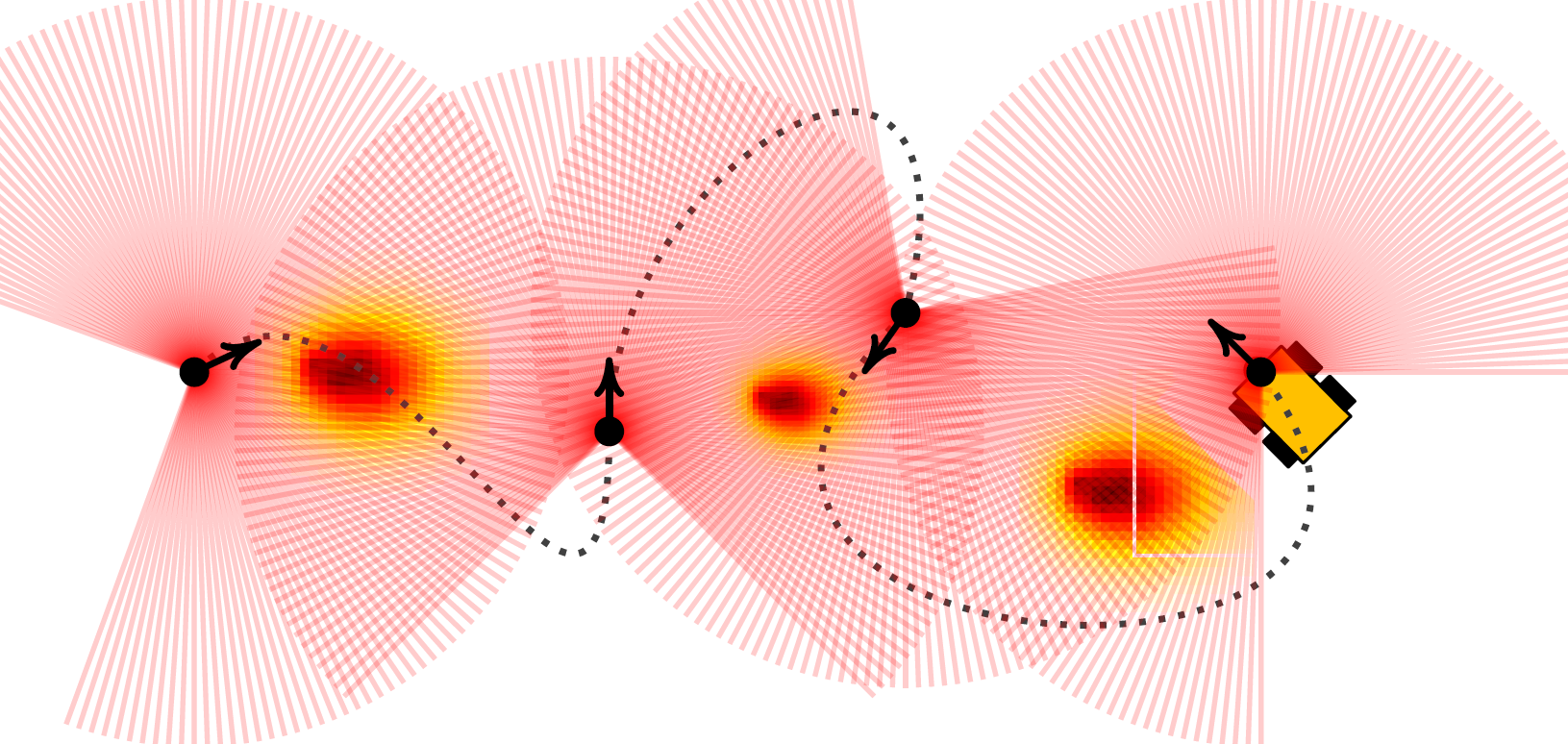
 T. P. Kucner, M. Magnusson, E. Schaffernicht, V. M. Hernandez Bennetts and A. Lilienthal.
T. P. Kucner, M. Magnusson, E. Schaffernicht, V. M. Hernandez Bennetts and A. Lilienthal.
Enabling Flow Awareness for Mobile Robots in Partially Observable Environments.
IEEE Robotics and Automation Letters 2017
[ BibTeX | DiVA ]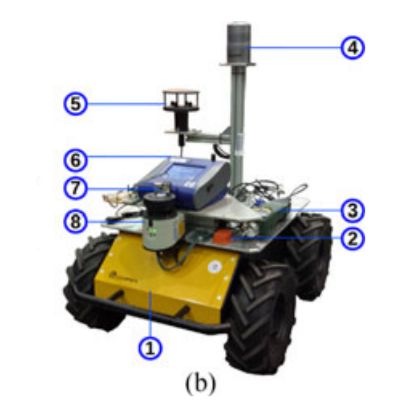 V. Hernandez Bennetts, T. P. Kucner, E. Schaffernicht, P. P. Neumann, H. Fan and A. J. Lilienthal.
V. Hernandez Bennetts, T. P. Kucner, E. Schaffernicht, P. P. Neumann, H. Fan and A. J. Lilienthal.
Probabilistic Air Flow Modelling Using Turbulent and Laminar Characteristics for Ground and Aerial Robots.
IEEE Robotics and Automation Letters, 2017.
[ BibTeX | DiVA ]

 R. Krug, T. Stoyanov and A. Lilienthal.
R. Krug, T. Stoyanov and A. Lilienthal.